
- Set le robot en mode "communication"
- Dos du bras en position "caméra"

- Cette position laisse la caméra analyser le rectangle bleu

- Zone d'analyse des canettes, tout se passe dans ce rectangle bleu
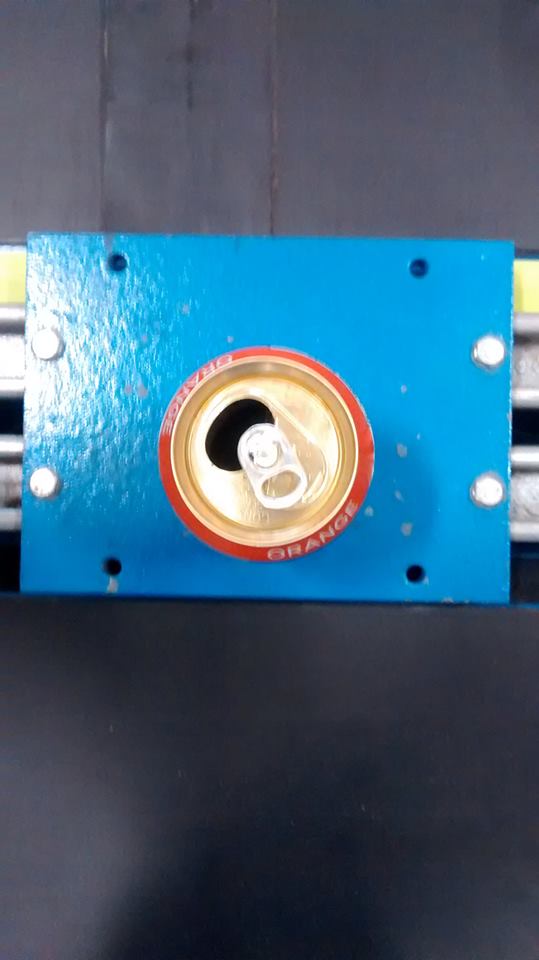
- Il y a assez de place pour analyser 3-4 canettes à la fois!

- Après avoir analysé l'ouverture de la canette, le bras se met en marche

- Les pinces se ferment sur la canette détectée

- On souleve la canette pour l'analyser sous d'autres angles

- La caméra analyse maintenant la marque de la canette

- Le bras depose la canette sur le convoyeur désigné, selon les résultats

- Le bras reviens en position "caméra" pour la prochaine canette

